Reconstruire Mars sur Terre
Le secteur de dépose des instruments d'InSight a été reproduit sur Terre
Peu après son atterrissage le 26 novembre dernier, la sonde InSight a commencé à cartographier en détails les quelques m2 du terrain orienté vers le sud, et situé juste devant le bras robotique, qui va servir au déploiement de ses deux principaux instruments. Grâce à la caméra IDC du bras robotique, l’atterrisseur a méthodiquement balayé le secteur dédié au sismomètre SEIS ainsi qu'au capteur de flux de chaleur HP3, renvoyant aux ingénieurs et géologues une foule de données.
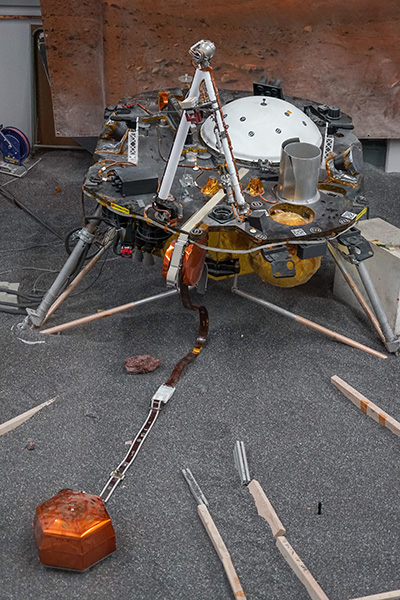 Le frère jumeau d'InSight, baptisé ForeSight, sur le banc de test du Jet Propulsion Laboratory, avec le sismomètre SEIS déployé au sol, au cours du sol 18. Le secteur de dépose a été découpé en trois compartiments. Le petit pointeur noir à droite indique le futur emplacement de la sonde de chaleur HP3 (© NASA/JPL-Caltech/IPGP/Philippe Labrot).
Le frère jumeau d'InSight, baptisé ForeSight, sur le banc de test du Jet Propulsion Laboratory, avec le sismomètre SEIS déployé au sol, au cours du sol 18. Le secteur de dépose a été découpé en trois compartiments. Le petit pointeur noir à droite indique le futur emplacement de la sonde de chaleur HP3 (© NASA/JPL-Caltech/IPGP/Philippe Labrot).
Injectées dans différents logiciels de visualisation, les informations collectées ont permis de construire un modèle numérique de terrain extrêmement précis, reproduisant les plus petits détails de la surface. Le moindre caillou a été identifié et numéroté, les pentes mesurées, la rugosité déterminée, de façon à permettre de choisir de la façon la plus optimale possible l’endroit où le sismomètre SEIS sera installé.
L’étude informatique du secteur de dépose n’a cependant constitué qu’une partie du travail. Au Jet Propulsion Laboratory (JPL) en Californie, une équipe d’ingénieurs ont mis en place un banc de test complet pour reconstituer sur Terre l’environnement martien de la plaine d'Elysium. Une réplique grandeur nature d’InSight, baptisée ForeSight, équipée de la totalité du système de déploiement (bras robotique IDA, caméras techniques ICC/IDC, etc.) domine une zone dans laquelle un matériel minéral (du grenat broyé) simulant le régolite martien a été déversé sur une épaisseur d’environ 10 centimètres.
Dès que la caractérisation du site d’atterrissage a été terminée sur Mars, les ingénieurs se sont employés à «terraformer» le bac à sable. Pour reproduire l’inclinaison de l’atterrisseur (dont le pont penche d’environ 4° vers l’avant), l’un des pieds de la sonde a été surélevé. Des techniques plus ou moins sophistiquées ont ensuite été mises en œuvre pour positionner les cailloux les plus importants (tout ceux dont la taille dépasse 2 cm), et modeler la surface.
La zone d'installation a été compartimentée en trois parties, grâce à des morceaux de bois. Le secteur situé juste devant le bras robotique est réservé pour l'instrument SEIS et son bouclier de protection thermique et éolien (WTS). Une partie un peu plus petite, délimitée vers la droite, correspond à l'emplacement du capteur de flux thermique HP3. Enfin, les deux surfaces sont séparées par un petit passage qui permet aux ingénieurs de circuler autour des zones de dépose et d'atteindre l'atterrisseur ForeSight.
Si les ingénieurs utilisent parfois un simple mètre ruban pour faire des mesures, ils se sont aussi appuyés sur le système VICON, très utilisé dans l’industrie cinématographique ainsi que celle du jeu vidéo pour effectuer des captures de mouvement. Des capteurs montés sur trépieds encadrent le bac à sable. Leur rôle est de pouvoir fournir des informations très précises sur la position, dans les trois dimensions de l’espace, de petites sphères réfléchissantes que les ingénieurs posent quand cela s’avère nécessaire sur les instruments ou les rochers.
L’équipe responsable du déploiement des instruments d’InSight exploite cependant une technologie encore plus avancée. Pour sculpter le terrain de manière à ce qu’il corresponde exactement à son homologue martien, les ingénieurs s'équipent de casques de réalité augmentée HoloLens conçus par la société Microsoft. Grâce à ce dispositif, des informations holographiques sont projetées sur le bac à sable, un modèle en 3D de la sonde se superposant alors parfaitement à la véritable structure de l’atterrisseur ForeSight.
 Marleen Sundgaard (ingénieur système responsable du banc de test InSight au JPL) et Tom Hoffman (chef de projet InSight au JPL) en train de suivre les opérations de reconstruction du site de dépose des instruments SEIS et HP3 sur le banc de test ForeSight, lors du sol 15 (© NASA/JPL-Caltech/IPGP/Philippe Labrot).
Marleen Sundgaard (ingénieur système responsable du banc de test InSight au JPL) et Tom Hoffman (chef de projet InSight au JPL) en train de suivre les opérations de reconstruction du site de dépose des instruments SEIS et HP3 sur le banc de test ForeSight, lors du sol 15 (© NASA/JPL-Caltech/IPGP/Philippe Labrot).
Commandés à la fois par des gestes de la main ainsi que par la voix, les casques dévoilent des informations trop subtiles pour être perçues correctement à l’œil nu. Au travers des visières, les pentes, creux et bosses apparaissent clairement sous la forme d’aplats colorés, ou de grillage multicolores. En projetant virtuellement un modèle numérique de terrain sur le bac à sable, les ingénieurs savent où ils doivent enlever du matériel, en rajouter, ou encore aplanir une surface.
Une fois le jardin de roches martien de ForeSight correctement modelé, les ingénieurs ont chargé sur l’atterrisseur les séquences de commande à tester avant leur envoi vers la planète rouge. Pour simuler la gravité martienne, le bras robotique IDA est relié à un palan, ce qui lui permet d’être artificiellement soutenu. La totalité de la séquence de dépose est ensuite jouée, généralement devant un public très nombreux d’ingénieurs et de scientifiques impliquées dans la mission, et invités à venir regarder l'événement par-delà une large baie vitrée surplombant le banc de test.
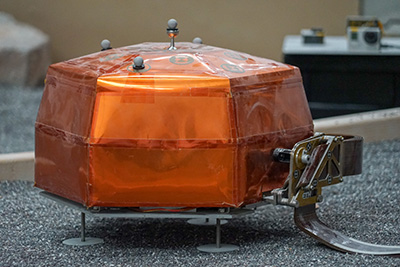 Le sismomètre SEIS du banc de test surmonté de sphères VICON (sol 18). Notez la petite sphère située sur la poignée de préhension (© NASA/JPL-Caltech/IPGP/Philippe Labrot).La séquence de déploiement est assez fascinante et impressionnante à observer. Avec des mouvements lents, parfois gracieux et parfois saccadés, le bras robotique IDA commence par positionner son grappin au-dessus de l’instrument SEIS. Les mâchoires de ce dernier se referment ensuite sur la petite poignée semi-sphérique qui surmonte le bloc de protection thermique cuivré hexagonal (RWEB) qui enveloppe les capteurs.
Le sismomètre SEIS du banc de test surmonté de sphères VICON (sol 18). Notez la petite sphère située sur la poignée de préhension (© NASA/JPL-Caltech/IPGP/Philippe Labrot).La séquence de déploiement est assez fascinante et impressionnante à observer. Avec des mouvements lents, parfois gracieux et parfois saccadés, le bras robotique IDA commence par positionner son grappin au-dessus de l’instrument SEIS. Les mâchoires de ce dernier se referment ensuite sur la petite poignée semi-sphérique qui surmonte le bloc de protection thermique cuivré hexagonal (RWEB) qui enveloppe les capteurs.
Une fois SEIS capturé par le bras, ce dernier soulève verticalement l’instrument, avant de partir en arrière, puis d’effectuer un demi-tour complet sur lui-même. Le bras s’allonge alors à son maximum d’extension tout en s'abaissant pour déposer lentement SEIS au sol. Il ne reste alors plus au grappin qu’à s’ouvrir pour libérer complètement le sismomètre, qui reste relié à l’atterrisseur par un câble sophistiqué composé de 5 rubans très rigides et indépendants.
Une fois validée, la séquence de commande testée sur Terre dans les conditions aussi réelles que possible qui viennent d'être décrites sera transmise sur la planète rouge, pour être ensuite exécutée de manière entièrement automatique par InSight sur place.
Pour aller plus loin :
-
Portrait de Marleen Martinez Sundgaard, responsable du banc de test ForeSight (en anglais).
-
Portrait d'Ashitey Trebi-Ollennu, responsable du bras robotique d'InSight (en anglais).