")

L'installation de SEIS à la surface de Mars (II)
L'installation du premier sismomètre à la surface de Mars par la sonde InSight (partie II)
Dans la première partie de cette série d'articles sur l'installation de SEIS à la surface de Mars, nous avons abordé le nivellement de l'instrument, le recentrage des capteurs VBB, et les premières étapes de l'installation du ruban plat qui relie le sismomètre à la sonde InSight. Cette seconde partie se concentre sur l'optimisation de l'installation du câble, une question qui est, comme nous allons le voir, très loin d'être triviale lorsqu'elle doit avoir lieu par robot interposé sur une autre planète. Avant de rentrer dans le vif du sujet, nous allons brièvement aborder la fin des opérations de nivellement.
Levelling low (nivellement au plus près du sol)
 Séquence animée d'images obtenues par la caméra ICC montrant l'opération de nivellement de bas niveau effectuée au cours du sol 44 (© NASA/JPL-Caltech).
Séquence animée d'images obtenues par la caméra ICC montrant l'opération de nivellement de bas niveau effectuée au cours du sol 44 (© NASA/JPL-Caltech).
Suite aux premiers essais infructueux de rangement du grappin du bras robotique d'InSight (voir ci-dessous), l’opération d’abaissement du sismomètre SEIS (leveling low), qui fait suite au nivellement proprement dit (sol 30), a été avancée par rapport au planning initial des opérations. Cette étape, effectuée sur Mars dès le sol 44, a consisté à actionner les trois pieds du berceau de mise à niveau de SEIS pour approcher ce dernier au plus près du sol.
Au cours de cette manœuvre, le sismomètre a été abaissé d'une hauteur de 18 mm en six étapes consécutives, chaque pied étant activé l’un après l’autre au cours des différents cycles de descente. L’objectif était de diminuer la longueur des pieds, et donc d’augmenter leur rigidité, pour améliorer le couplage de l’instrument avec la surface martienne. Une manipulation très simple permet de comprendre le principe derrière cette démarche : si l'on place une cuillère sur une table en faisant dépasser le manche sur une grande longueur, on s'aperçoit qu'il est facile de le faire vibrer en appuyant dessus. Au contraire, si la partie du manche qui dépasse est très courte, il devient beaucoup plus difficile de le faire osciller.
L’abaissement du sismomètre répondait également à un second objectif : diminuer sa hauteur par rapport au sol en vue de la dépose du bouclier de protection thermique et éolien (WTS). Le sismomètre SEIS ne doit effectivement en aucun cas toucher l'intérieur de la coupole du bouclier.
InSight joue au bilboquet sur Mars
La dernière étape avant l’installation définitive du bouclier de protection thermique et éolien (WTS) consistait à augmenter l’espace séparant les deux plaques métalliques du dispositif appelé LSA (Load Shunt Assembly), après leur séparation mécanique au cours du sol 40. Arrivé assez tard dans le design du sismomètre, le LSA est situé sur l'un des côtés de l'instrument. Il force le câble à former une boucle dite de service, dont l'objectif est de faire obstacle du mieux possible aux perturbations transitant par le câble (notamment les déformations que subit ce dernier suite aux contrastes de température très importants existant entre le jour et la nuit sur Mars).
De manière à améliorer le niveau d’ouverture du LSA, le câble de SEIS devait être tiré en arrière grâce à l’action de la pelle du bras robotique d'InSight sur la petite poignée d'un dispositif appelé "pinning mass", une masselotte située sur le câble à proximité de SEIS, et dont le rôle est d’alourdir ce dernier et d’améliorer son contact avec le sol. Or, pour positionner la pelle et exercer une poussée sur la pinning mass, le grappin du bras robotique, déployé au cours du sol 18 (15 décembre 2018) après la caractérisation complète de la zone de dépose (workplace) des instruments, devait absolument être ramené en position de stockage.
Là où les choses se compliquent, c'est que la manœuvre qui consiste à ranger le grappin est l’une des plus compliquées à réaliser pour l’équipe responsable du bras robotique d'InSight. L’une des difficultés tient au fait que le grappin est relié au bras par deux câbles flexibles. Le premier, lâche et de couleur orange, assure l’alimentation électrique. Le second, de couleur blanche et fabriqué en vectran, retient le grappin. C’est lui qui conditionne les comportements (rotations, mouvements de balancier, etc.) de ce dernier lorsque le bras robotique bouge, et la façon dont il est suspendu. Or, comme tous les matériaux flexibles ou mous (depuis les suspentes ou la toile des parachutes en passant par le ruban plat qui relie SEIS à InSight), ce câble donne des soucis aux ingénieurs, étant donné que son comportement ne peut pas être parfaitement modélisé, et qu’il n’est pas non plus possible d’intervenir facilement dessus.
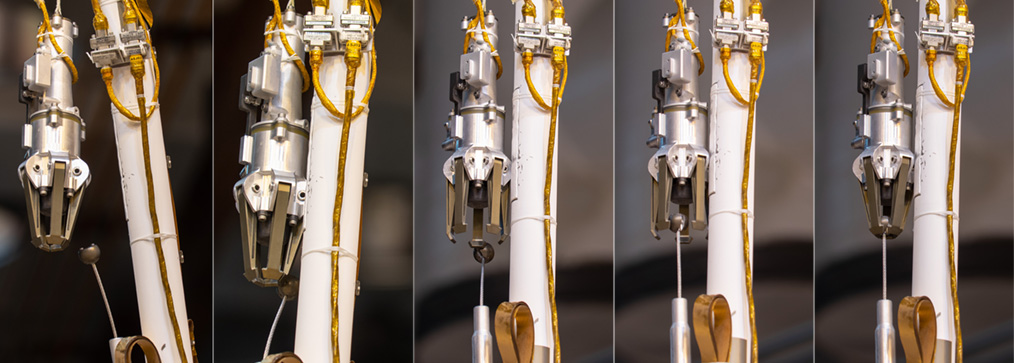
 Séquence animée d'images obtenues par la caméra IDC montrant les tentatives n° 3 et 4 de rangement du grappin au cours des sols 46 et 50 respectivement (© NASA/JPL-Caltech).
Séquence animée d'images obtenues par la caméra IDC montrant les tentatives n° 3 et 4 de rangement du grappin au cours des sols 46 et 50 respectivement (© NASA/JPL-Caltech).
Au cours du sol 42, une première tentative pour ranger le grappin a eu lieu sur Mars, sans succès. Deux sols plus tard (sol 44), un second essai identique a été programmé, là aussi sans donner satisfaction. La manœuvre initiale de remise en position de stockage du grappin consistait à étirer complètement vers le haut le bras robotique, de manière à ce que le grappin se retrouve suspendu presque au dessus d'une petite sphère de contention, fixée au sommet d'une tige d’acier semi-flexible. Après son ouverture, un mouvement du bras devait ramener l'extrémité du grappin tout contre la sphère. Ensuite, en tournant sur lui-même, le grappin devait faire passer ses griffes entre la sphère de capture, pour ensuite l'entourer. En se refermant, il pouvait alors se retrouver solidement fixé tout contre le bras robotique.
Si les ingénieurs avaient réalisé avec succès de nombreux tests avec le frère jumeau d'InSight sur Terre, les échecs sur Mars des sols 42 et 44 montraient que la procédure de rangement du grappin était effectivement assez délicate sur Mars. Par rapport aux tests joués sur le banc de test, deux paramètres ne pouvaient pas être totalement prise en compte par les ingénieurs : les très basses températures martiennes, qui peuvent rigidifier les matériaux (mais qui sont assez bien gérées dans les modélisations numériques), aussi que la faible gravité martienne, qui ne peut jamais être parfaitement compensée ou simulée. La combinaison des deux pouvait expliquer la réussite de l'opération sur Terre, et son échec vexant sur Mars.
Pour tenter de mieux comprendre la source du problème sur la planète rouge, l’équipe responsable du bras robotique d'InSight a amélioré la séquence de stockage du grappin pour la troisième tentative du sol 46, et programmé la caméra IDC pour obtenir une série d’images plus fournie. Une fois rapatriées sur Terre, les clichés ont clairement montré qu’une fois ouvert, les doigts du grappin ne parvenaient toujours pas à saisir la petite sphère de contention montée sur le bras robotique.
Comparée à la manœuvre initiale, la technique du sol 46 consistait à coller le grappin encore fermé à la tige de préhension, d'abord en étendant au maximum le bras verticalement, puis en déplaçant ensuite légèrement l’avant bras en arrière. C’est seulement lorsque le grappin reposait en appuyant franchement sur la petite sphère du dispositif de capture (en faisant plier la tige semi-flexible) qu’il pouvait être ouvert. Un mouvement additionnel de bascule de l’avant bras vers l’arrière devait ensuite permettre aux cinq griffes d’entourer la sphère, ce qui devait assurer la capture lorsque le grappin était ensuite refermé. Hélas, pour le sol 46, le mouvement vers l’arrière avait été trop timide, et lorsque le grappin s’est ouvert, il était encore trop loin de la sphère, et il s’est donc refermé sur du vide.
 Différentes étapes de la nouvelle séquence de capture du grappin testées avec l'atterrisseur ForeSight du Jet Propulsion Laboratory au cours du sol 48. Le grappin, ainsi que la sphère de capture montée sur une tige semi-flexible sont bien visibles (© NASA/JPL-Caltech/IPGP/Philippe Labrot).
Différentes étapes de la nouvelle séquence de capture du grappin testées avec l'atterrisseur ForeSight du Jet Propulsion Laboratory au cours du sol 48. Le grappin, ainsi que la sphère de capture montée sur une tige semi-flexible sont bien visibles (© NASA/JPL-Caltech/IPGP/Philippe Labrot).
Retour sur le banc de test ForeSight pour les ingénieurs d'InSight, qui travaillent désormais à l'implémentation d'une nouvelle séquence de commandes permettant d'effectuer le rangement du grappin sur Mars avec le maximum d’efficacité. Cette fois-ci, la manœuvre est découpée en deux parties : au cours du sol 50, une première série d’activités était programmée pour caractériser le comportement du grappin et de sa tige de préhension. La capture devait avoir lieu deux sols plus tard, même si les ingénieurs savaient qu’il existait une possibilité de capture "accidentelle" au cours du sol 50.
Par rapport à la tentative du sol 46, l’ampleur du premier mouvement vers l’arrière avait été augmentée. En plus du mouvement inversé de l’avant bras permettant aux cinq griffes d’entourer la sphère, un mouvement supplémentaire avait aussi été planifié. Les ingénieurs s’étaient effectivement rendu compte que lorsque le grappin s’ouvrait en étant en contact avec la tige de préhension, l’une des griffes pouvait appuyer sur la sphère et empêcher le grappin de venir se placer correctement au-dessus du dispositif de capture. Dans ce cas, le grappin pouvait finir par se fermer de l’autre côté de la sphère. Grâce à un mouvement de bascule supplémentaire vers l’avant après réouverture du grappin, il était possible de bénéficier d’une seconde chance de capture.
 L'atterrisseur ForeSight du Jet Propulsion Laboratory avec le bras robotique en position verticale lors d'un test de capture du grappin au cours du sol 48 (© NASA/JPL-Caltech/IPGP/Philippe Labrot).Pour ne rien arranger à cette situation déjà bien compliquée, il faut savoir que sur Mars, les opérateurs ne peuvent hélas pas laisser le bras dans une position verticale pendant plusieurs sols d'affilé, ce qui permettrait de réaliser une partie de la séquence de capture, d’acquérir des images, et sur la base de ces dernières, d’effectuer des mouvements correctifs par rapport à une situation donnée. Effectivement, lorsque le bras pointe vers le haut, la caméra IDC regarde directement vers le ciel, une situation très défavorable, car la poussière peut alors très facilement s’accumuler sur la lentille. A chaque sol, l'avant bras doit donc être impérativement replié à l’horizontal, ce qui signifie que les ingénieurs doivent recommencer chaque séquence de capture depuis le début à chaque nouveau sol.
L'atterrisseur ForeSight du Jet Propulsion Laboratory avec le bras robotique en position verticale lors d'un test de capture du grappin au cours du sol 48 (© NASA/JPL-Caltech/IPGP/Philippe Labrot).Pour ne rien arranger à cette situation déjà bien compliquée, il faut savoir que sur Mars, les opérateurs ne peuvent hélas pas laisser le bras dans une position verticale pendant plusieurs sols d'affilé, ce qui permettrait de réaliser une partie de la séquence de capture, d’acquérir des images, et sur la base de ces dernières, d’effectuer des mouvements correctifs par rapport à une situation donnée. Effectivement, lorsque le bras pointe vers le haut, la caméra IDC regarde directement vers le ciel, une situation très défavorable, car la poussière peut alors très facilement s’accumuler sur la lentille. A chaque sol, l'avant bras doit donc être impérativement replié à l’horizontal, ce qui signifie que les ingénieurs doivent recommencer chaque séquence de capture depuis le début à chaque nouveau sol.
Lorsque les images du sol 50 sont arrivées sur Terre, elles ont été accueillies avec soulagement et satisfaction par l'équipe technique. Comme cela avait été espéré, la capture avait eu lieu du premier coup, et les séquences programmées pour le sol 52 n'avaient plus lieu d'être. Si les tests de rangement du grappin avaient continué à échouer, le grappin lui-même aurait pu être utilisé pour déplacer la pinning mass, en lieu et place de la pelle. Au cours du sol 48, des essais de positionnement du grappin au-dessus de la poignée de la pinning mass avaient d'ailleurs été effectués au cas où. D'un point de vue théorique, il aurait également été possible d'écarter le LSA en déplaçant avec le grappin le sismomètre lui-même vers l'avant, mais cette solution aurait donné des sueurs froides aux sismologues de la mission, et tout a donc été fait pour éviter cette alternative de dernier recours.
Ecartement du LSA par ajustement de la position de la pinning mass avec la pelle du bras robotique
Avec le grappin désormais fixé le long du bras robotique au cours du sol 50, les activités d’installation du câble de SEIS pouvaient reprendre. Rappelons que l’objectif était donc d'écarter les deux plaques métalliques du LSA, pour barrer le passage aux vibrations parasites circulant sur le câble, en tirant celui-ci grâce à la pinning mass.
La séquence d’ajustement de la position de la pinning mass consistait à approcher la pelle du bras robotique de cette dernière, à une distance d'engagement d'environ 5 cm. Quatre mouvements supplémentaires de 2 cm le long de l’axe du câble permettaient ensuite de se rapprocher de la poignée de la pinning mass, de commencer à appuyer dessus, et enfin de la déplacer véritablement. Le bras robotique devait ensuite se désengager de la pinning mass pour acquérir des images du LSA (il n’est effectivement pas possible de voir à la fois la pinning mass, et d’imager simultanément le LSA avec la caméra IDC avec le bon angle de vue).
D'un point de vue théorique, pour couper les vibrations parasites, les deux plaques du LSA n'avaient qu'à être physiquement séparées par une distance infinitésimale (quelques nanomètres pouvaient suffire). Cependant, le câble pouvant se relaxer au cours du temps (ou lors de la dépose du WTS), les ingénieurs avaient décidé qu'une distance minimale de 2 cm était requise pour valider définitivement l'installation. D'un autre côté, les ingénieurs devaient veiller à ne pas trop écarter le LSA, de manière à éviter que la plaque externe ne vienne toucher la jupe du WTS.
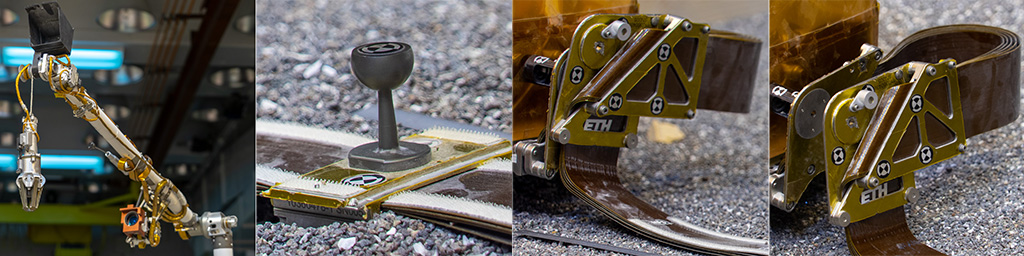 De gauche à droite, (1) le bras robotique d'InSight avec le godet de la pelle, le grappin et la caméra IDC, (2) la pinning mass sur le câble plat reliant le sismomètre SEIS à la sonde InSight, et (3 et 4) le dispositif LSA en position "fermée" (les plaques métalliques se touchent) et "ouverte" (les plaques sont séparées). Le LSA force le câble de SEIS à former une boucle de service, qui permet de contrer les vibrations parasites qui peuvent circuler sur le câble et venir parasiter les mesures sismiques (© NASA/JPL-Caltech/IPGP/Philippe Labrot).
De gauche à droite, (1) le bras robotique d'InSight avec le godet de la pelle, le grappin et la caméra IDC, (2) la pinning mass sur le câble plat reliant le sismomètre SEIS à la sonde InSight, et (3 et 4) le dispositif LSA en position "fermée" (les plaques métalliques se touchent) et "ouverte" (les plaques sont séparées). Le LSA force le câble de SEIS à former une boucle de service, qui permet de contrer les vibrations parasites qui peuvent circuler sur le câble et venir parasiter les mesures sismiques (© NASA/JPL-Caltech/IPGP/Philippe Labrot).
Pour vérifier que les deux plaques du LSA étaient suffisamment écartées l’une de l’autre, deux techniques pouvaient être mises en œuvre. La première, la plus évidente, consistait à prendre des images grâce à la caméra IDC du bras robotique. Cette solution ne pouvait cependant fournir des informations valables que si les plaques étaient écartées par au moins de 2 centimètres. Sinon, il n’était effectivement pas possible d’apercevoir le sol martien dans le vide laissé entre elles sur les images.
La seconde technique de caractérisation de l'ouverture du LSA est plus subtile, mais elle s'est révélée extrêmement utile. Elle nécessitait d'utiliser les capteurs sismiques SP et VBB de l’instrument SEIS pour se mettre à l'écoute de résonances caractéristiques. Selon le niveau d’ouverture du LSA, le sismomètre enregistre effectivement des séries de vibrations à certaines fréquences, qui peuvent donc être utilisées pour quantifier très finement l'écartement et ses bénéfices. Quand le LSA est "fermé", il se comporte comme un système assez rigide, qui vibre à des fréquences assez hautes. Au contraire, quand il est "ouvert", il devient assez lâche, et oscille avec plus de liberté dans différentes directions à des fréquences plus basses. Aucune optimisation de l’ouverture du LSA n’était prévue en fonction des fréquences de vibrations observées, mais cette technique permettait de confirmer sans ambiguïté la séparation effective des plaques, et donc le fonctionnement de la boucle de service.
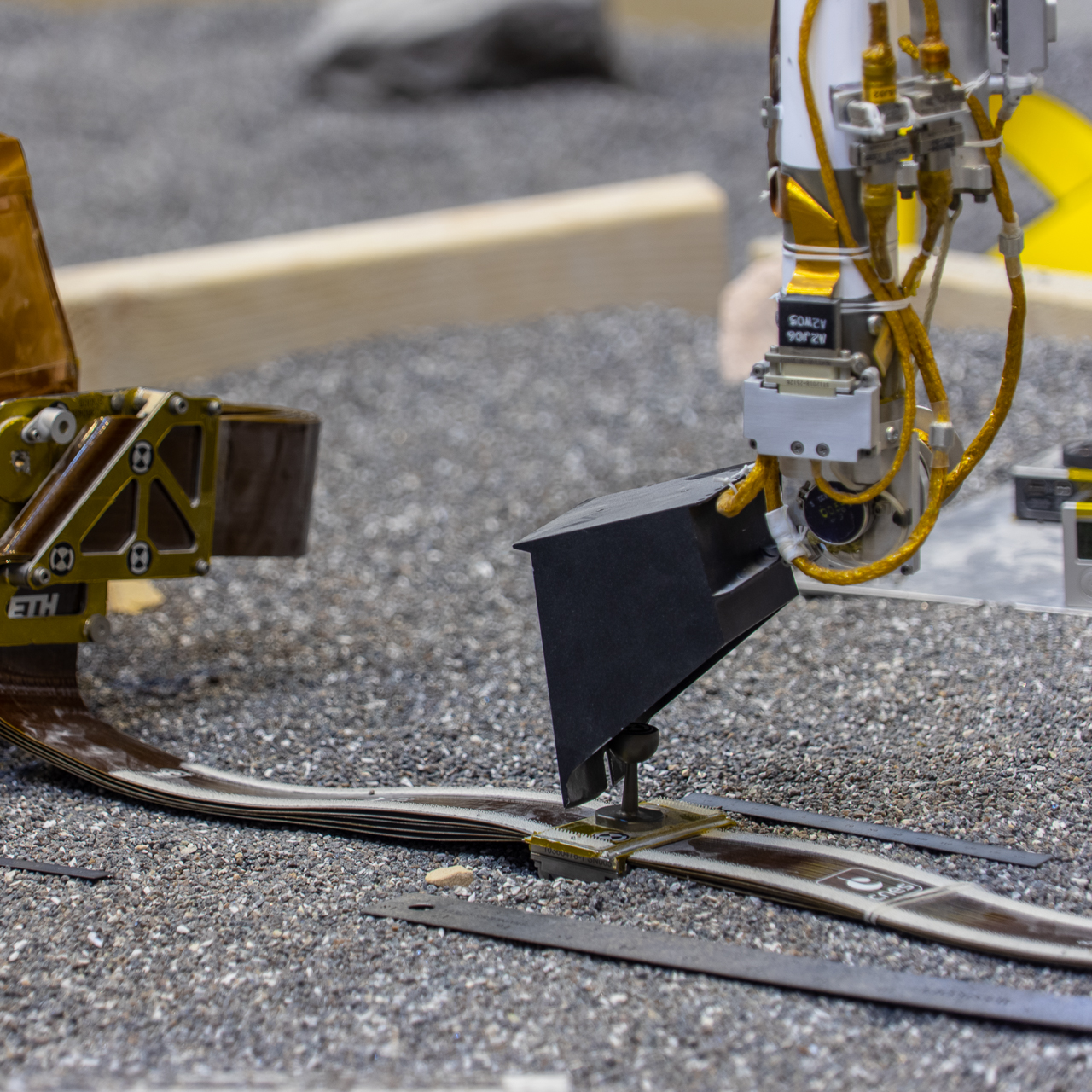 Test d'ajustement de la pinning mass avec la pelle du bras robotique sur le banc de test ForeSight du Jet Propulsion Laboratory au cours du sol 48 (© NASA/JPL-Caltech/IPGP/Philippe Labrot).
Test d'ajustement de la pinning mass avec la pelle du bras robotique sur le banc de test ForeSight du Jet Propulsion Laboratory au cours du sol 48 (© NASA/JPL-Caltech/IPGP/Philippe Labrot).
La position dans les trois dimensions de l'espace étant plus difficile à mesurer pour la pelle que pour le grappin, des manœuvres préliminaires permettant de déterminer les mouvements à programmer pour que cette dernière puisse rentrer en contact avec la pinning mass ont eu lieu au cours du sol 52. La première tentative d'ajustement de la pinning mass était ensuite prévue pour le sol 54 (20 janvier 2019). Cependant, un incident au niveau de l'antenne DSS-26 de 34 mètres de la station de télécommunication DSN de GoldStone a empêché l'envoi des commandes vers Mars, repoussant le premier essai au sol 56.
Lors du sol 56, les images obtenues ont montré que si la pelle du bras robotique s'était parfaitement alignée dans l'axe du câble, elle n'avait fait qu'effleurer la poignée de la pinning mass, sans véritablement la déplacer. En conséquence, aucun écartement n'avait pu avoir lieu entre les deux plaques du LSA, qui continuaient à se toucher.
Le second essai a eu lieu au cours du sol 59. Par rapport à la manœuvre du sol 56, la pelle avait été abaissée de 7 mm supplémentaires, et l'ampleur des mouvements vers l'arrière augmenté de 3 cm. Cette fois-ci, une véritable traction avait eu lieu sur la pinning mass, mais le LSA n'était pas encore suffisamment ouvert (ce qui n'était guère surprenant au vu de la rigidité du câble). Contrairement à ce que les images peuvent laisser penser, les deux plaques s'étaient bel et bien séparées, mais l'espace existant dans la partie supérieure était très faible (dans la partie basse, l'écartement était d'environ 2 cm : les plaques du LSA n’étant pas parfaitement parallèles, l’écartement de la partie basse est effectivement plus important de quelques centimètres que celui de la partie haute). Bien que trop faible pour satisfaire les sismologues, la séparation était clairement confirmée par les mesures de résonance réalisées par les capteurs sismiques de SEIS.
Une troisième tentative, exécutée au cours du sol 61 a finalement permis d'écarter les plaques du LSA de façon optimale : 2 cm dans la partie haute, pour 5 cm pour la partie basse. Au cours de toutes les manœuvres de traction du câble, les inclinomètres du berceau de mise à niveau ont montré que SEIS n'a pratiquement pas bougé, ce qui indique que sa stabilité sur le sol martien est très bonne.
Au final, après la séparation mécanique des deux plaques du LSA au cours du sol 40 par l'activation d'un frangibolt, il aura fallu aux ingénieurs plus de 20 sols pour écarter à un niveau suffisant le dispositif en question. Ce délai pris dans les opérations de surface s'explique par le fait que pour réussir à tirer le câble, le bras robotique a dû effectuer deux opérations particulièrement compliquées : le rangement du grappin, et ensuite l'ajustement de la position de la pinning mass. Cette période a cependant été mise à profit par les scientifiques, qui ont pu collecter un grand nombre de données avec le sismomètre SEIS. Les capteurs ont pu être allumés sur des périodes de plus en plus longues, et les VBB ont même pu être basculés en mode scientifique (ce qui n'était normalement pas prévu avant la dépose du WTS), en fournissant des données d'excellentes qualités.
Vents et tempêtes de poussière (de l'utilité d'un WTS)
D'un point de vue météorologique, l'année 2018 a été pour le moins agitée sur Mars. Détectée pour la première fois à la fin du mois de mai dans la région de Perseverance Valley, une tempête de poussière s'est levée, pour grossir et finir par recouvrir la totalité de la planète en juin 2018 (provoquant hélas la perte de communications avec le rover américain Opportunity, qui opérait à proximité immédiate du secteur d'origine de la tempête). Si celle-ci a fini par faiblir au mois de septembre, l'atmosphère martienne reste chargée en poussière, et le phénomène est donc toujours une menace. A partir du sol 42 (8 janvier 2019), des données en provenance du satellite Mars Reconnaissance Orbiter de la NASA ont montré qu'une nouvelle tempête de poussière locale était en train de se former sur la planète rouge au niveau de l'hémisphère sud.
 Séquence animée d'images obtenues par la caméra ICC montrant les essais d'ajustement de la pinning mass fixée sur le câble du sismomètre SEIS sur Mars (© NASA/JPL-Caltech/IPGP).Les panneaux solaires d'InSight sont très performants, justement pour résister à une baisse de luminosité causée par la présence de particules de poussière en suspension dans l'air. En situation nominale, ces panneaux produisent quotidiennement plus d'énergie qu'aucune autre mission jamais envoyée sur Mars. Suite à l'apparition de la nouvelle tempête, une baisse de puissance de 20 % a été mesurée sur seulement trois sols consécutifs. Si la situation est à nouveau stable, l'énergie fournie par les panneaux solaires d'InSight est suivie de très près par les ingénieurs.
Séquence animée d'images obtenues par la caméra ICC montrant les essais d'ajustement de la pinning mass fixée sur le câble du sismomètre SEIS sur Mars (© NASA/JPL-Caltech/IPGP).Les panneaux solaires d'InSight sont très performants, justement pour résister à une baisse de luminosité causée par la présence de particules de poussière en suspension dans l'air. En situation nominale, ces panneaux produisent quotidiennement plus d'énergie qu'aucune autre mission jamais envoyée sur Mars. Suite à l'apparition de la nouvelle tempête, une baisse de puissance de 20 % a été mesurée sur seulement trois sols consécutifs. Si la situation est à nouveau stable, l'énergie fournie par les panneaux solaires d'InSight est suivie de très près par les ingénieurs.
D'une manière générale, l'activité éolienne est assez importante au niveau du site d'atterrissage d'InSight. Les fameux enregistrements sonores, fournis par les capteurs à courtes périodes (SP) ainsi que le capteur de pression de la station météorologique APSS, qui permettent d'entendre le murmure des vents tourbillonnant autour de l'atterrisseur, sont en ce sens très démonstratifs. Pour InSight, les vents offrent un moyen naturel, et assez efficace, de faire le ménage et d'enlever la poussière sur toute surface où celle-ci peut se déposer. C'est le cas des panneaux solaire bien entendu, mais également de la lentille de la caméra ICC, qui n'a été que partiellement protégé par son capot de protection de la poussière soulevée par le souffle des rétrofusées lors de l'atterrissage en novembre 2018. Les images de cette caméra montrent clairement que le vent ne cesse d'ôter au fil du temps les particules collées à l'objectif, les clichés obtenus étant effectivement de plus en plus nets.
Cependant, d'un point de vue sismologique, les vents constituent une source très importante de bruits, et doivent donc être neutralisés du mieux possible. C'est pourquoi la dépose, au-dessus du sismomètre ultra-sensible SEIS, du bouclier éolien et thermique WTS est cruciale pour isoler l'instrument de l'agitation de l'environnement martien.
Dans le troisième et dernier volet de cette série d'articles sur l'installation du premier sismomètre à la surface de Mars, nous aborderons la dépose du bouclier de protection thermique et éolien WTS. Pour cette étape presque aussi cruciale que celle du déploiement du sismomètre, les ingénieurs devront déployer à nouveau le grappin, le positionner au-dessus du WTS puis capturer la poignée de préhension, décrocher le WTS du pont en activant un frangibolt, et finalement soulever le bouclier pour le déposer au-dessus du sismomètre en une seule étape.
C'est seulement lorsque le WTS aura été posé que la campagne d'observations scientifiques pourra véritablement débuter. Sous la protection du WTS, les capteurs sismiques du sismomètre SEIS pourront enfin être allumés en permanence, le jour et la nuit, sans craindre des périodes où les températures deviennent trop extrêmes (au moment où cet article est écrit, SEIS est éteint pendant les 10 heures les plus froides de la nuit). Protégés de l'environnement particulièrement turbulent de Mars, les pendules seront également enfin en position de saisir les plus infimes tremblements de la planète rouge.
 Les ingénieurs du Jet Propulsion Laboratory Pranay Mishra (à gauche) et Marleen Sundgaard (à droite) surveillent un test d'ajustement de la position de la pinning mass du câble SEIS sur le banc de test ForeSight avec la pelle du bras robotique. L'objectif est de tirer sur le câble de SEIS pour augmenter l'écartement des deux plaques métalliques de la boucle de service, de façon à neutraliser les vibrations parasites circulant sur le câble en question (© NASA/JPL-Caltech/IPGP/Philippe Labrot).
Les ingénieurs du Jet Propulsion Laboratory Pranay Mishra (à gauche) et Marleen Sundgaard (à droite) surveillent un test d'ajustement de la position de la pinning mass du câble SEIS sur le banc de test ForeSight avec la pelle du bras robotique. L'objectif est de tirer sur le câble de SEIS pour augmenter l'écartement des deux plaques métalliques de la boucle de service, de façon à neutraliser les vibrations parasites circulant sur le câble en question (© NASA/JPL-Caltech/IPGP/Philippe Labrot).