")

Déploiement des instruments
Le sismomètre SEIS et le pénétrateur HP3 doivent être déposés au sol
Une fois posée saine et sauve sur les étendues monotones et poussiéreuses de la plaine d'Elysium, la sonde InSight va devoir s'atteler à une étape essentielle dans la déroulement de sa mission : celle consistant à déposer ses deux principaux instruments, le sismomètre SEIS et le capteur de flux thermique HP3 au sol.
Zone de dépose
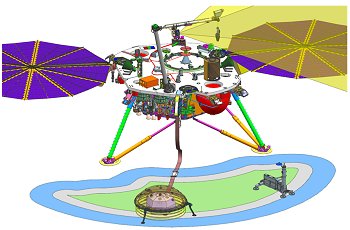 La zone de déploiement des instruments SEIS et HP3 mesure environ 3m2 (© NASA)Les limitations de déplacement du bras robotique IDA font que sismomètre et le capteur de flux thermique HP3 devront être positionnés au pied de l'atterrisseur, dans une zone en forme de croissant qui mesurera environ 3 mètres de longueur pour deux mètres de largueur. Le secteur qui autorise la dépose de l'instrument HP3 est sensiblement plus important en termes de superficie que celui attribué au sismomètre SEIS : 3,4 m2 pour le premier contre 3,1 m2 pour le second.
La zone de déploiement des instruments SEIS et HP3 mesure environ 3m2 (© NASA)Les limitations de déplacement du bras robotique IDA font que sismomètre et le capteur de flux thermique HP3 devront être positionnés au pied de l'atterrisseur, dans une zone en forme de croissant qui mesurera environ 3 mètres de longueur pour deux mètres de largueur. Le secteur qui autorise la dépose de l'instrument HP3 est sensiblement plus important en termes de superficie que celui attribué au sismomètre SEIS : 3,4 m2 pour le premier contre 3,1 m2 pour le second.
La zone de dépose des instruments sera photographiée en détail par les caméras techniques de la sonde InSight. Montée sur le bras, la caméra IDC est déplacée de manière à acquérir des images stéréo, qui se recouvriront à environ 80 % et assureront une couverture complète du sol. Le premier jeu de 8 images est pris avec le bras robotique au-dessus du pont de l'atterrisseur, de manière à s'assurer que la seconde prise de vue à un mètre au-dessus de la surface sera sûre. Ensuite, 24 images stéréo sont enregistrées, et serviront à produire un modèle numérique de terrain (DEM) avec une résolution presque centimétrique.
Toutes les phases du processus de dépose des instruments seront également photographiées : pré-positionnement du grappin, engagement du grappin, soulèvement de l'instrument, placement au sol, libération de la charge, etc.
Bac à sable
La totalité du processus de déploiement sera simulée sur Terre avant son exécution sur Mars, dans un bac à sable géant situé à l'intérieur d'un vaste hangar. A l'intérieur d'un enclos une maquette fonctionnelle de l'atterrisseur, équipée de caméras et d'un bras robotique en tout point similaire à la sonde réelle, sera installée. La maquette inclura également des instruments fictifs, mais identiques en terme de masse et de volume à ceux envoyés sur Mars.
Grâce aux images des caméras techniques et avec l'appui d'un modèle numérique de terrain, codage informatique en 3D du site d'atterrissage, un terrain reproduisant dans ses moindres détails la surface martienne pourra être réalisé. Le bac à sable sera rempli d'un matériau rougeâtre simulant le sol concassé et pulvérulent que les spécialistes appellent régolite. Des roches de différentes tailles et formes seront alors ajoutées à l'ensemble. Contrairement à un jardin japonais, l'objectif visé ici ne sera pas esthétique. Il s'agira d'abord et avant tout de coller du mieux possible à la réalité !
Déploiement des instruments
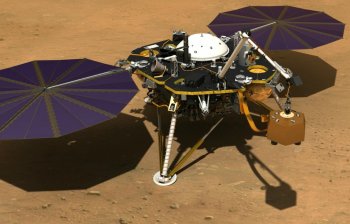 Déploiement du sismomètre SEIS par le bras robotique de la sonde InSight (© NASA)Une fois que les quelques mètres carrés du site d'atterrissage d'Elysium auront été dupliqués sur Terre, les ingénieurs commenceront à effectuer des tests, qui aboutiront à la mise au point d'un jeu de commandes pour la première étape du processus de déploiement.
Déploiement du sismomètre SEIS par le bras robotique de la sonde InSight (© NASA)Une fois que les quelques mètres carrés du site d'atterrissage d'Elysium auront été dupliqués sur Terre, les ingénieurs commenceront à effectuer des tests, qui aboutiront à la mise au point d'un jeu de commandes pour la première étape du processus de déploiement.
Une fois validées, les commandes seront envoyées vers Mars, charge à la sonde InSight de les exécuter. Etape par étape, ce processus sera répété, jusqu'à ce que les instruments soient correctement déployés au sol.
On l'a compris, hors de question pour l'équipe en charge du déploiement des instruments de travailler dans la précipitation. Un planning précis, rythmé en partie par les contraintes de la bande passante allouée aux télécommunications, a été mis au point. Après chaque étape du processus de déploiement, des vérifications, indispensables à la poursuite des opérations, seront effectuées. Les ingénieurs disposeront d'une marge confortable à chaque point clé, ainsi qu'à la fin du processus de déploiement, pour pouvoir faire face aux aléas inévitables à ce genre d'activité.
La phase critique des opérations de déploiement est découpée en six parties, et pourra s'étendre jusqu'à deux mois après l'atterrissage (dont 20 sols de marge). Durant cette période, les équipes seront sur le pont en permanence, et ce contrairement à la phase de mesures scientifique, où la sonde fonctionnera presque entièrement de façon autonome. Le cadencement des opérations est donné ci-dessous :
-
Sols 0 - 5 : initialisation de l'atterrisseur et préparation du déploiement des instruments.
-
Sols 6 - 18 : caractérisation de l'espace disponible pour le positionnement des instruments par les caméras et sélection des sites potentiels de dépose les plus intéressants.
-
Sol 7 (science) : début de l'acquisition des données RISE (géodésie).
-
Sols 19 - 31 : déploiement du sismomètre SEIS (voir détail ci-dessous). Début des mesures en mode ingénierie.
-
Sols 32 - 43 : déploiement du bouclier thermique et éolien WTS sur le sismomètre. Début des mesures scientifiques (monitoring) de SEIS à partir du sol 40.
-
Sols 44 - 58 : déploiement du capteur de flux thermique HP3. Devenu inutile, le bras robotique est parqué en position de repos sur l'atterrisseur.
-
Sols 59 - 69 : début des opérations de forage avec le pénétrateur HP3.
Déploiement de SEIS
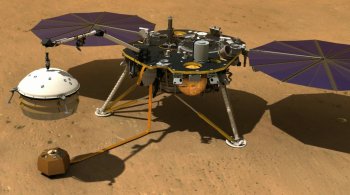 Déploiement du bouclier de protection thermique et éolien WTS par le bras robotique de la sonde InSight (© NASA)Le sismomètre SEIS sera déposé de façon prioritaire. La rigidité du câble assurant les communications ainsi que l'alimentation en énergie empêchera de placer l'instrument dans certains secteurs de la zone de dépose.
Déploiement du bouclier de protection thermique et éolien WTS par le bras robotique de la sonde InSight (© NASA)Le sismomètre SEIS sera déposé de façon prioritaire. La rigidité du câble assurant les communications ainsi que l'alimentation en énergie empêchera de placer l'instrument dans certains secteurs de la zone de dépose.
En cas d'incident, il sera éventuellement possible de soulever à nouveau le sismomètre pour le repositionner un peu plus loin, mais certains mouvements seront proscrits, comme un retour en arrière, là aussi à cause du comportement du câble.
Une fois que le sismomètre reposera sur la surface martienne, bien ancré sur les trois pieds de son berceau de nivellement, la seconde étape consistera à le recouvrir du bouclier thermique et éolien (WTS), qui n'est autre qu'un imposant couvercle de protection. Les ingénieurs devront prendre garde à laisser un intervalle d'au moins 6 centimètres entre la paroi extérieure du sismomètre et le bord intérieur du WTS.
Viendra ensuite le tour du capteur de flux thermique HP3, qui, sans doute pour le remercier d'avoir ainsi patienté, sera autorisé à débuter les opérations de pénétration dans le sol martien juste après sa dépose à la surface de Mars.
Mise en marche du sismomètre SEIS
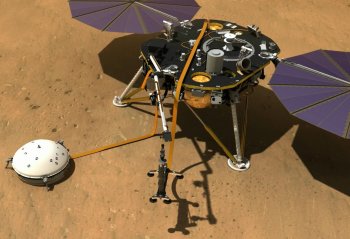 Déploiement du capteur de flux thermique HP3 par le bras robotique de la sonde InSight (© NASA).
Déploiement du capteur de flux thermique HP3 par le bras robotique de la sonde InSight (© NASA).
La mise en service du sismomètre SEIS aura lieu en plusieurs étapes, dont le séquençage est présenté ci-dessous.
Dans un premier temps, SEIS sera posé au sol sans que le grappin ne soit retiré. Des mesures préliminaires seront alors effectuées dans cette configuration. Si la situation ne convient pas, le sismomètre pourra aisément être déplacé ailleurs, sans nécessité pour les ingénieurs d'avoir à se livrer à l'exercice délicat qui consiste à tenter d'attraper la poignée de transport de l'instrument avec le grappin du bras.
Le déploiement d'un sismomètre à la surface d'une autre planète est un défi qui ne doit pas être pris à la légère. Ici, SEIS doit absolument pouvoir être déposé sur une surface dont l'inclinaison est inférieure à 15°. Celle-ci doit également être plate, sans rochers, et capable de supporter le poids du sismomètre et de son lourd bouclier de protection thermique et éolien (WTS). Enfin, le couplage sismique, c'est à dire la qualité du contact entre le sol et les pieds du sismomètre, doit être excellent.
Jusqu'à présent, les seuls instruments déposés directement à la surface d'un autre astre que la Terre, la Lune, ont bénéficié de l'aide inestimable de la main de l'homme, et aucun n'a jamais été déployé par l'intermédiaire d'un robot. Il en est de même des rovers martiens, qui n'ont jamais réalisés de telles opérations, même s'ils ont parfois approchés des capteurs montés sur des bras robotiques près de roches ou du sol.
Une fois le sismomètre SEIS en contact avec le sol, le système de nivellement est activé pour aligner le sismomètre avec l'horizontal, et ce avec une précision de 0,3°. A l'intérieur de la sphère, les pendules très large bande sont alors recentrés grâce au dispositif d'équilibrage. Pour le lancement, le moteur de recentrage des pendules est placé dans sa position de stockage, avec la masselotte mobile située près de la butée en position haute. Une fois sur Mars, la masselotte est déplacée pour centrer précisément les pendules et trouver le juste équilibre entre la gravité martienne et la force de rappel exercée par le ressort des pendules. Une fois centrés, ceux-ci peuvent alors être calibrés.
 La sonde InSight avec les instruments SEIS et HP3 au sol (© NASA)Pour vérifier la qualité du couplage et confirmer le choix du site de dépose, des mesures sont effectuées en mode ingénierie pendant une journée martienne (un sol). Le mode ingénierie est assez résistant aux variations de température (qui à ce stade ne sont pas encore corrigées), mais il n'offre pas des performances suffisantes pour conduire des mesures scientifiques. Dans ce mode, le sismomètre ne peut pas non plus subir une saturation, c'est à dire être submergé par l'ampleur des signaux enregistrés, ce qui est un avantage.
La sonde InSight avec les instruments SEIS et HP3 au sol (© NASA)Pour vérifier la qualité du couplage et confirmer le choix du site de dépose, des mesures sont effectuées en mode ingénierie pendant une journée martienne (un sol). Le mode ingénierie est assez résistant aux variations de température (qui à ce stade ne sont pas encore corrigées), mais il n'offre pas des performances suffisantes pour conduire des mesures scientifiques. Dans ce mode, le sismomètre ne peut pas non plus subir une saturation, c'est à dire être submergé par l'ampleur des signaux enregistrés, ce qui est un avantage.
Si les données recueillies durant la première journée ne donnent pas satisfaction, le sismomètre, toujours accroché au grappin, est déplacé. Sinon, le bras robotique libère l'instrument, permettant ainsi la dépose du bouclier de protection thermique et éolien WTS.
Dans cette configuration, le dispositif de compensation thermique qui équipe chaque pendule (TCDM) peut alors être mis en action. Au lancement, le TCDM est aligné avec la verticale, position dans laquelle il n'a aucune action sur le pendule. Maintenant que le sismomètre est sur Mars, il faut modifier sa position pour amortir du mieux possible les variations de température.
En mode ingénierie, avec le TCDM en position verticale (0°), on observe les variations de température pendant une journée. Celles-ci prennent la forme d'une sinusoïde au niveau du signal sismique.
La journée suivante, le TCDM est tourné à 90°, position dans laquelle son efficacité est maximale. L'objectif est d'avoir une réduction efficace (par exemple d'un facteur 10), des effets des variations de la température. Contrairement à ce que l'on pourrait penser, l'efficacité du TCDM ne dépend pas de l'amplitude des variations, mais de la valeur de la température moyenne. Il est toutefois possible que l'amortissement produit par le TCDM soit trop important.
Les jours suivants, une rotation du TCDM à un angle donné est éventuellement effectuée pour optimiser son fonctionnement par rapport a ce qui a été observé sur Mars au cours des journées précédentes.
Le sismomètre restera en mode ingénierie jusqu'au réglage final du TCDM. Ensuite, il sera basculé en mode scientifique. Ce mode, qui n'est pas compatible avec de fortes variations de température (qui sont maintenant compensées), est moins robuste que le mode ingénierie, et il présente un risque de saturation des capteurs dans certaines conditions. Cependant, il délivre un niveau de performances qui permet des mesures ayant la qualité attendue par la communauté scientifique internationale.