")

L'atterrisseur InSight en LEGO
L'atterrisseur InSight en LEGO
Pour les activités de médiation scientifique, une réplique assez fidèle de l'atterrisseur InSight en LEGO a été développée par un membre de l'équipe de planétologie de l'IPGP, en collaboration avec une désigneuse française.
Le 5 mai 2018 s’ouvrira la fenêtre de tir pour InSight, la prochaine mission martienne de la NASA. L’atterrisseur InSight décollera du centre spatial de Vandenberg (appartenant à l’Air Force) en Californie, en direction de la planète rouge. Ce sera le premier lancement interplanétaire à avoir lieu depuis la côte ouest des Etats-Unis.
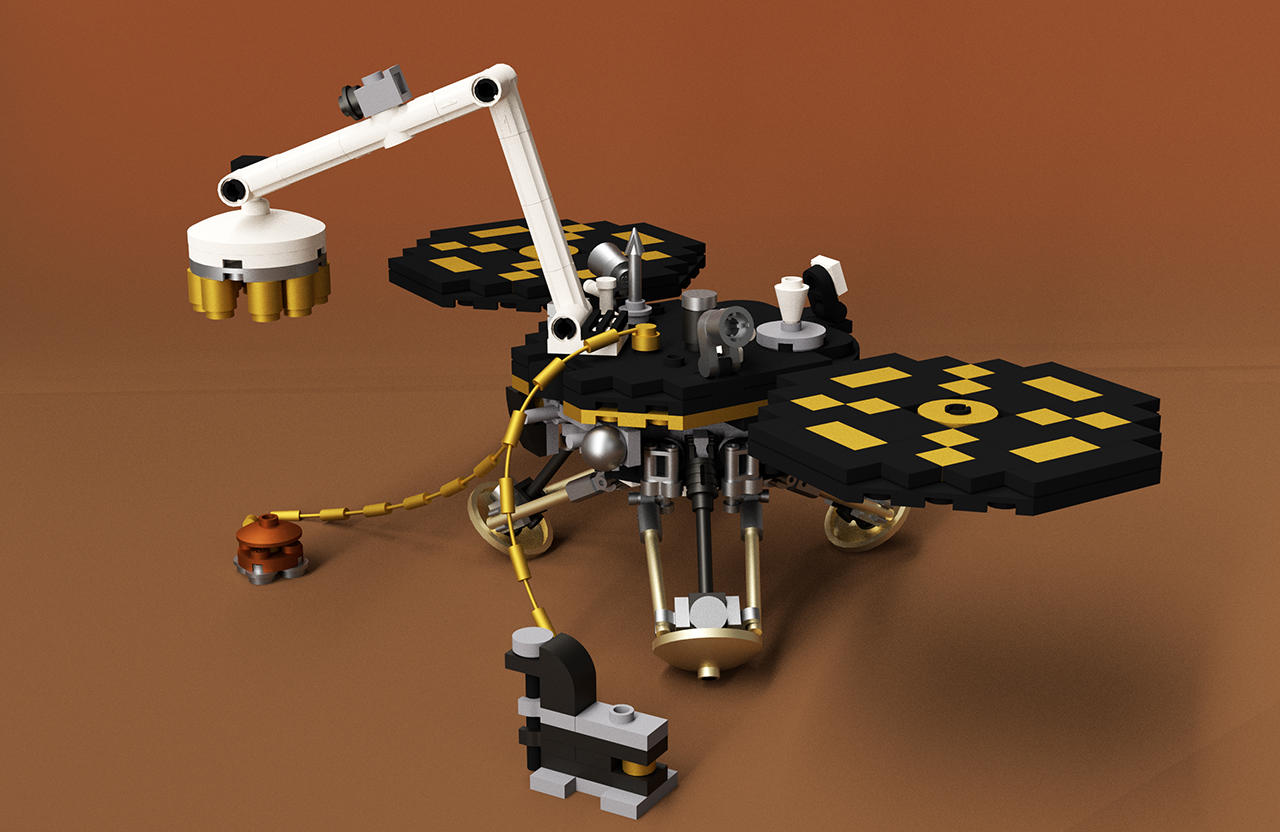 La sonde InSight en LEGO (© Whatsuptoday).
La sonde InSight en LEGO (© Whatsuptoday).
Le 26 novembre 2018, après un voyage de six mois dans l’espace profond, InSight atterrira sur les plaines monotones et poussiéreuses d’Elysium, à proximité de l’équateur martien, au cours d’une descente incroyablement périlleuse et complexe de 6 minutes au travers de l’atmosphère martienne. Si tout se déroule comme prévu, la sonde pourra alors déployer sur le sol martien deux instruments cruciaux : un sismomètre ultra-sensible (SEIS) protégé par un bouclier thermique et éolien, et un capteur sophistiqué de flux de chaleur (HP3), qui s’enfoncera dans le sol.
L’objectif d’InSight est unique dans l’histoire de l’exploration de la planète rouge. Jusqu’à présent, la cible de presque toutes les missions lancées vers Mars n’était autre que sa surface rocailleuse. Mais InSight (Interior Exploration Using Seismic Investigations, Geodesy, and Heat Transport, c'est-à-dire Exploration de l’Intérieur s’appuyant sur des Investigations Sismiques, la Géodésie et le Transport de Chaleur) vise un objectif bien différent et fascinant : l’intérieur de la planète elle-même, depuis sa croûte externe jusqu’au noyau métallique central.
Pour promouvoir la mission et faciliter la médiation scientifique, une réplique en LEGO assez fidèle de la sonde InSight, à une échelle compatible avec les fameuses mini-figurines, a été réalisée. Le modèle donne l’opportunité de découvrir les principales caractéristiques du vaisseau et de sa charge utile, tout en offrant une bonne jouabilité :
-
Les panneaux solaires sont inclinables et détachables, ce qui permet de placer la sonde en configuration de vol (panneaux solaires repliés ou détachés) ou en configuration au sol (panneaux solaires déployés).
-
Les trois pieds de l’atterrisseur peuvent s’incliner entre 45° et 60°.
-
La partie inférieure de l’atterrisseur permet d’apercevoir les nombreuses antennes du radar de descente (utilisé durant la séquence d’atterrissage), ainsi que les trois grappes de 4 rétrofusées.
-
Le bras robotique (IDA) peut tourner à 360° sur sa base, et possède deux articulations. Comme le bras réel, il supporte une caméra technique (IDC), un grappin et une petite pelle. Son rôle principal est de déployer le sismomètre SEIS (ainsi que le bouclier de protection thermique et éolien, le WTS) au sol, puis de poser le capteur de flux de chaleur HP3 (pas trop près du sismomètre !). Dans cette réplique, le grappin peut tourner sur lui-même pour maintenir sa charge verticalement lorsque le bras bouge.
-
Le bras IDA peut se replier complètement sur le pont (configuration de vol).
-
Le pont de la sonde offre suffisamment d’espace pour accueillir le sismomètre SEIS et le capteur de flux de chaleur HP3, en plus du bouclier WTS, durant le lancement et la phase de croisière. Le WTS prend place au-dessus d’un micro-baromètre (un capteur de pression atmosphérique ultra-sensible) qui appartient à la station météo.
-
Au sol, le WTS recouvre complètement le sismomètre SEIS.
-
Le sismomètre SEIS est connecté à l’atterrisseur par un câble flexible et détachable de 20 tenons de longueur. Un second câble est utilisé pour le capteur de flux de chaleur HP3.
-
La taupe d’HP3 est détachable. Une version pointue de la taupe est même fournie, pour plus de réalisme.
-
En plus des deux instruments principaux de la mission InSight (SEIS et HP3), le pont de l’atterrisseur accueille aussi les deux mâts météorologiques (TWINS) de la station météo APSS, les deux antennes coniques à gain moyen de l’expérience de géodésie RISE, et enfin l’antenne UHF utilisée pour les communications radio avec les satellites en orbite martienne (comme la sonde Mars Reconnaissance Orbiter de la NASA).
-
Une tuile spéciale inclinable, sur laquelle le logo officiel de la mission a été gravé, sert de cible de calibration pour la caméra IDC du bras robotique.
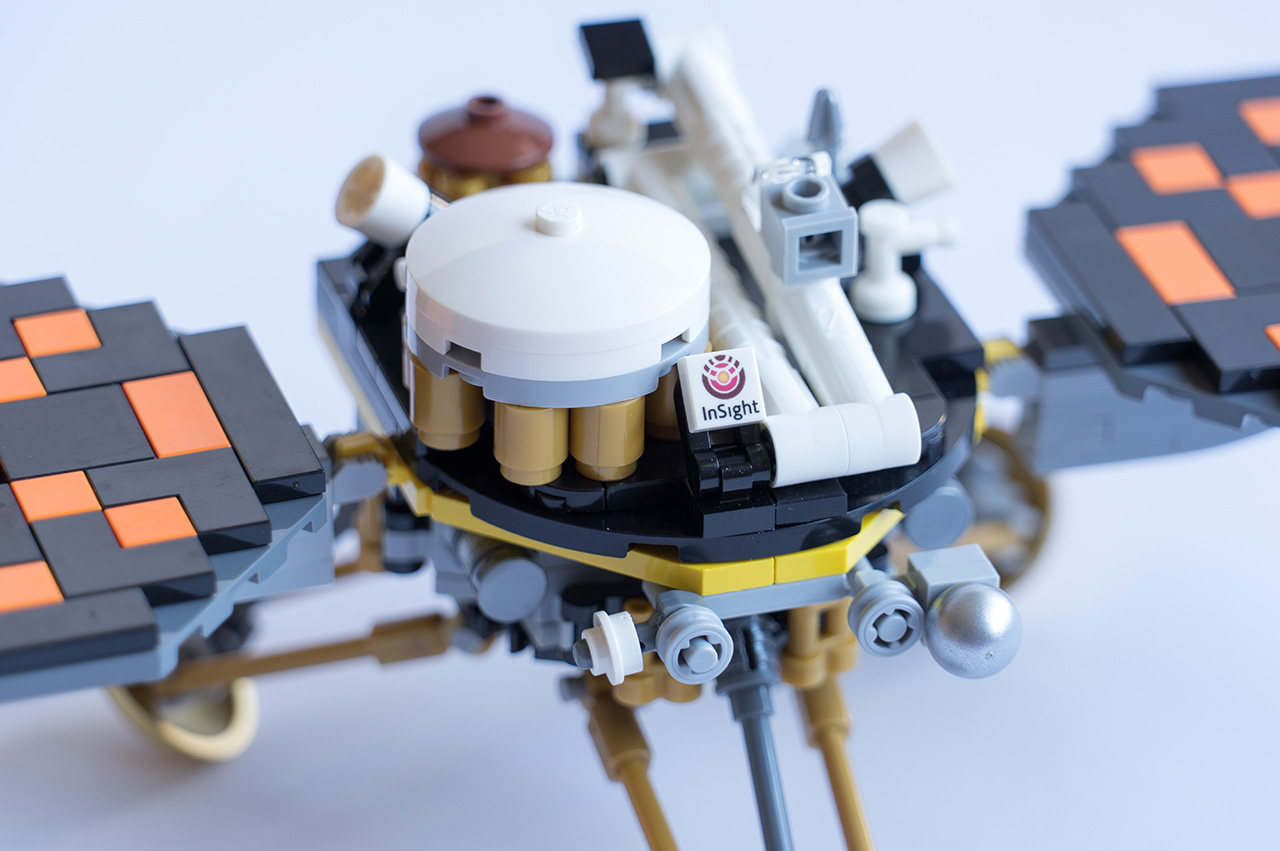 Photographie du pont de la sonde InSight en LEGO, montrant notamment le bras robotique, le bouclier de protection éolien et thermique, et le logo de la mission (© Philippe Labrot).
Photographie du pont de la sonde InSight en LEGO, montrant notamment le bras robotique, le bouclier de protection éolien et thermique, et le logo de la mission (© Philippe Labrot).
En plus de l’atterrisseur InSight décrit ci-dessus, plusieurs accessoires (dont une plateforme élévatrice et une grue) sont proposées pour mettre en scène des étapes de l’ATLO (Assemblage, Test et Opérations de Lancement) dans un environnement de type salle blanche. Les sondes martiennes sont souvent représentées à la surface de Mars, mais les endroits terrestres où elles sont assemblées et testées sont tout aussi fascinants.
Enfin, un présentoir qui reproduit la surface plate et rouillée du secteur choisi pour l’atterrissage sur Mars (Elysium Planitia) a également été conçu.
Les plans permettant le montage de la sonde InSight en LEGO, ainsi que la liste de briques nécessaires à son assemblage sont disponibles ici. Il est également possible de supporter le projet sur le site LEGO Ideas.